Как сделать робота на ROS своими руками. Часть 1: шасси и бортовая электроника
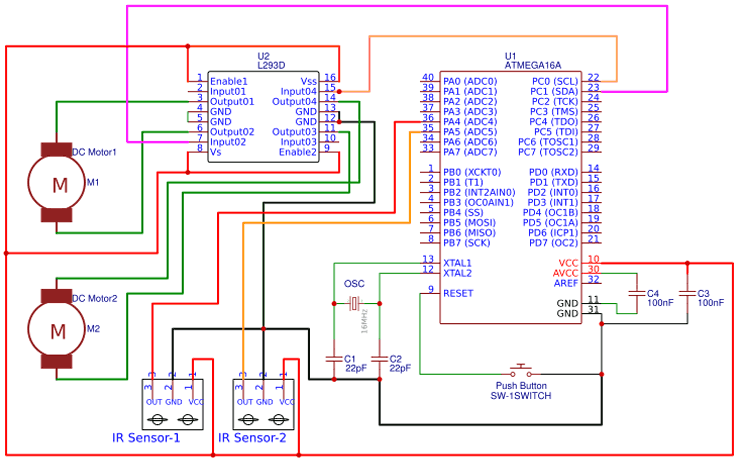
Робот, объезжающий препятствия, является одним из самых популярных типов роботов, создаваемых энтузиастами-радиолюбителями. По сути, это обычный робот на колесах, который может двигаться в пространстве, не сталкиваясь ни с какими препятствиями. Принципы работы современных роботов-пылесосов во многом похожи на принцип работы рассматриваемого в нашей статье робота, хотя в них и используются значительно более дорогие датчики.








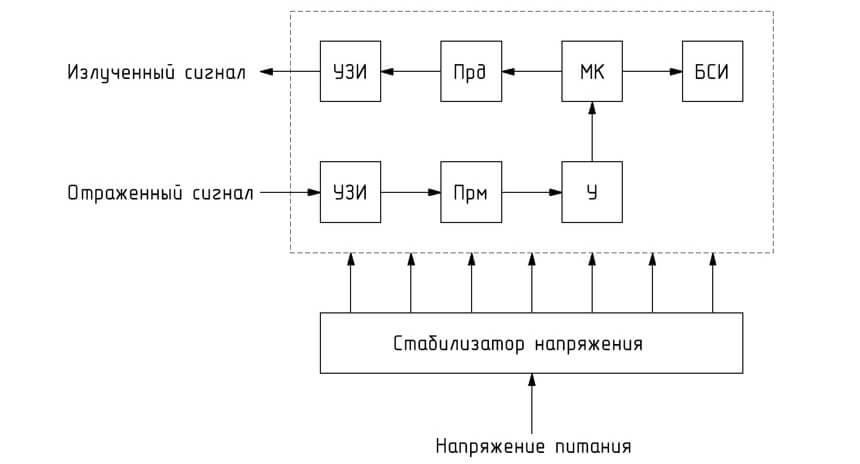
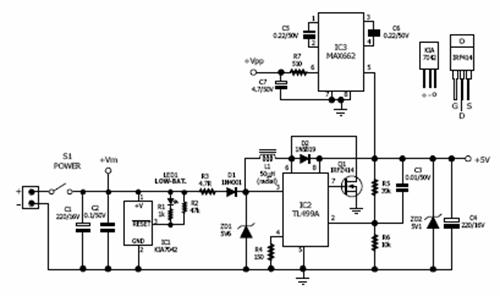
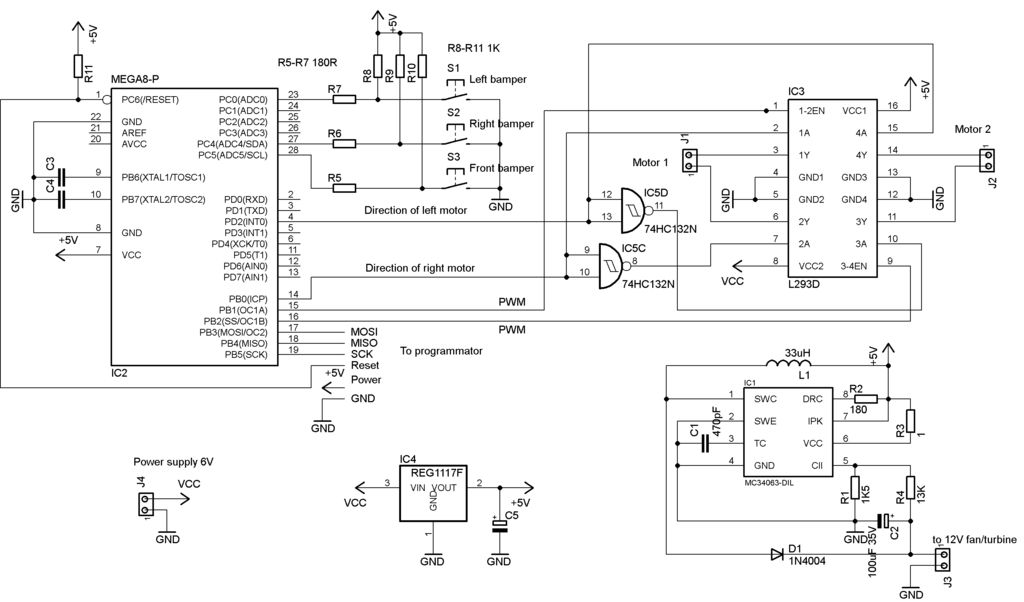
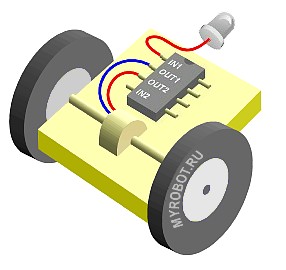
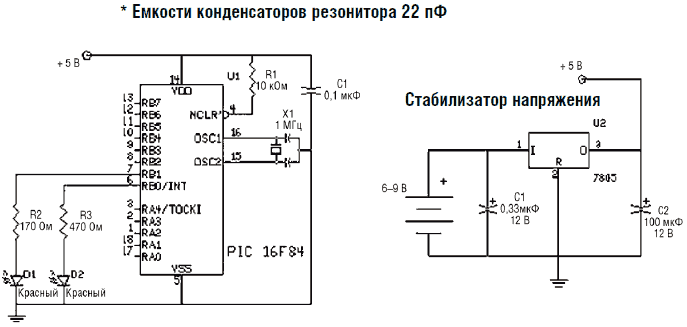
Постановка задачи такая: робот должен оценивать и индицировать уровень шума в помещении и, при превышении некоторого порога, проигрывать фонограммы с micro-SD карты и, при этом, открывать рот в такт со звуком. Рисунок 1. Внешний вид устройства. Демонстрацию его работы можно посмотреть здесь:. Рисунок 2. Схема электрическая принципиальная.




| 248 | Отправьте статью сегодня! Журнал выйдет 20 апреля , печатный экземпляр отправим 24 апреля. | |
| 410 | Отправьте статью сегодня! Журнал выйдет 20 апреля , печатный экземпляр отправим 24 апреля. | |
| 289 | Создание робота — это всегда волнующее событие для всех энтузиастов, увлекающихся электроникой. |
Поиск Написать публикацию. Время на прочтение 8 мин. DIY или Сделай сам. Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают.