Как подключить к Arduino 2 (ДВА) и более энкодера.
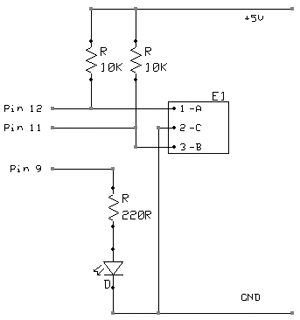
Задача не так проста как может показаться. Речь пойдет про механические энкодеры с кнопкой EC Принцип работы и общий алгоритм работы с этими устройствами был разобран в статье Подключение энкодера EC11 к ESP32 программное решение , но воспользоваться тем примером при работе с Arduino не получится - так как прерывания из среды Arduino IDE поддерживаются только на выводах 2,3 а для двух энкодеров потребуется 4 ноги с прерываниями. С ESP32 было все проще - там прерывания поддерживаются всеми выводами, и весь код уместился в 60 строк.












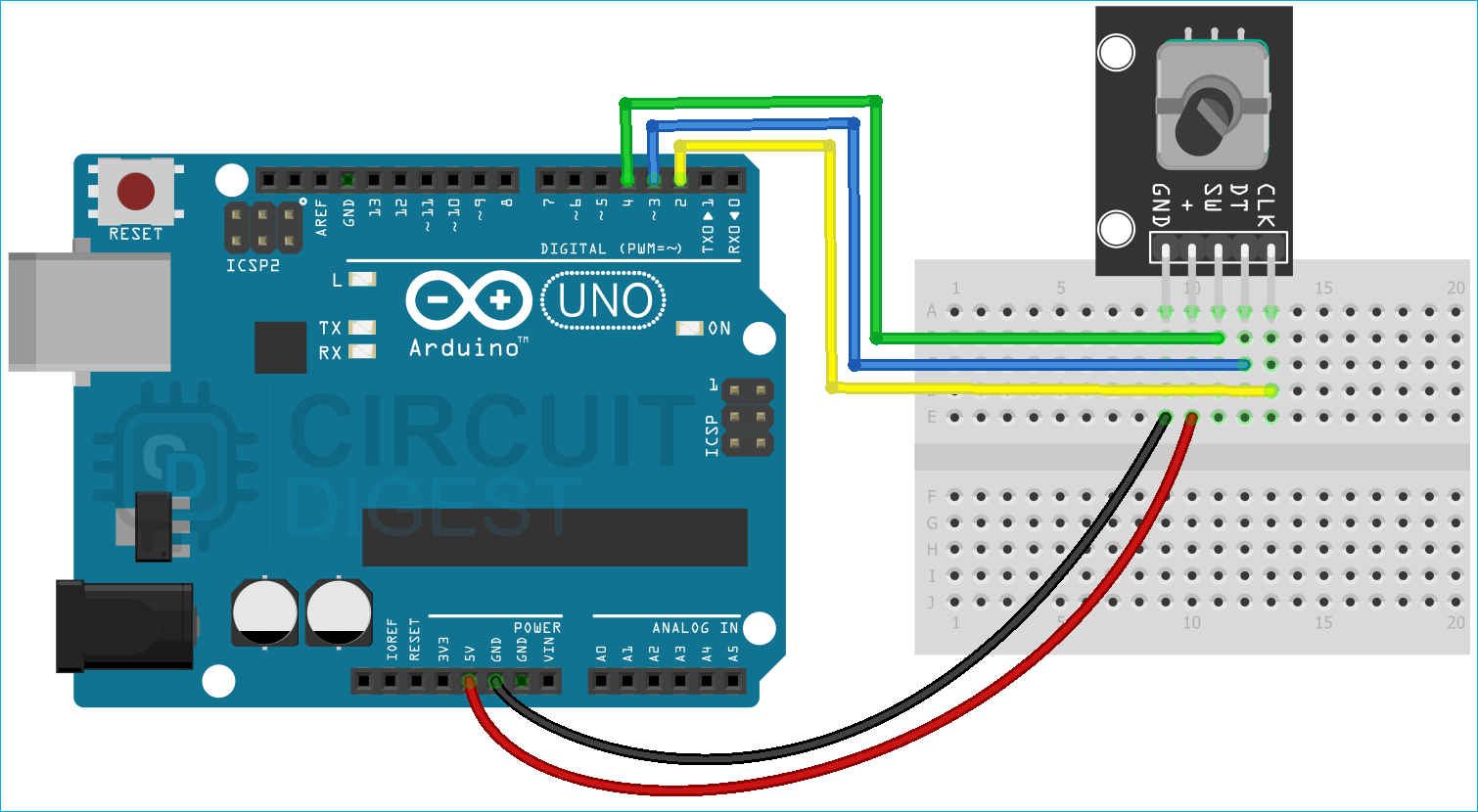
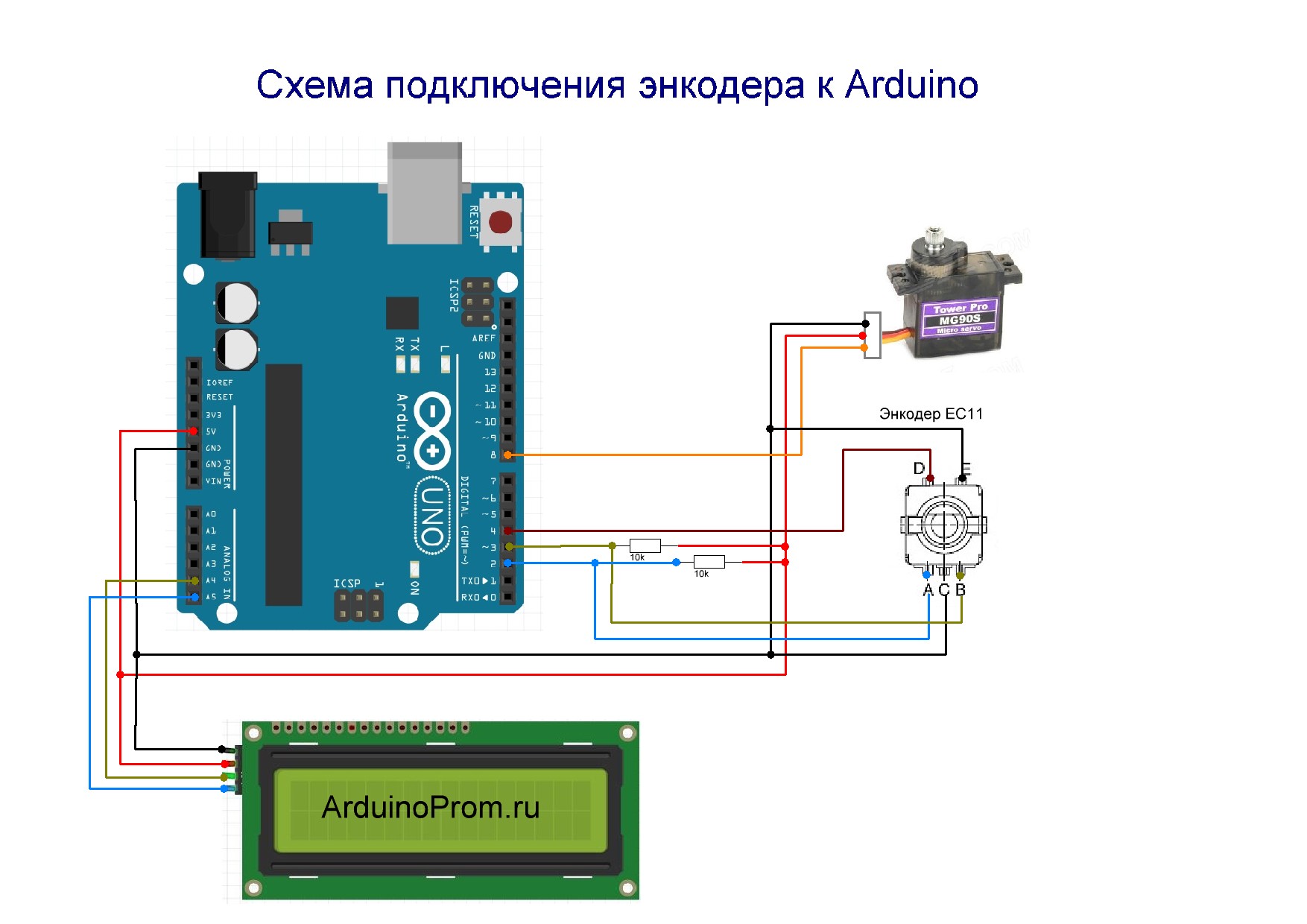
Плата Arduino Nano, инкрементальный инкрементный энкодер EC11, драйвер для шагового двигателя DRV, макетная плата, соединительные провода, и биполярный шаговый двигатель Mitsumi. После загрузки скетча для теста контактов энкодера, можно подключать энкодер к плате Arduino Nano, как показано на этой схеме. Этот вариант кода, не отключает драйвер шагового двигателя, то есть после завершения вращения продолжается подача питания на шаговый двигатель, таким образом происходит потребление энергии, но зато таким образом, вал шагового двигателя жестко удерживается. Если при удержании вала шаговый двигатель нагревается более чем на 50 градусов, то следует уменьшить подачу тока, немного повернув регулятор на драйвере шагового двигателя, по часовой стрелке для DRW! При использовании драйвера шагового двигателя A, уменьшение тока происходит при вращении регулятора против часовой стрелки! Этот вариант кода более оптимизированный, но драйвер шагового двигателя отключается через пол секунды после завершения вращения вала.
- Опубликовано:
- Trema-модуль Энкодер с памятью - это датчик угла поворота, позволяющий дискретно прерывисто определять угол поворота вала, его направление и нажатие на вал. Но в отличии от обычных энкодеров, данный модуль сам определяет факт и направление каждого шага поворота вала.
- Многие думаю слышали что такое энкодер.
- Теория и практика. Обучающие статьи, примеры, технические решения, схемы, обзоры интересных электротехнических новинок.
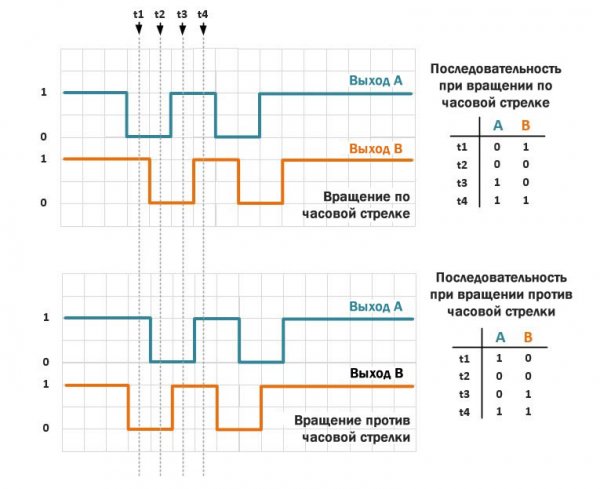
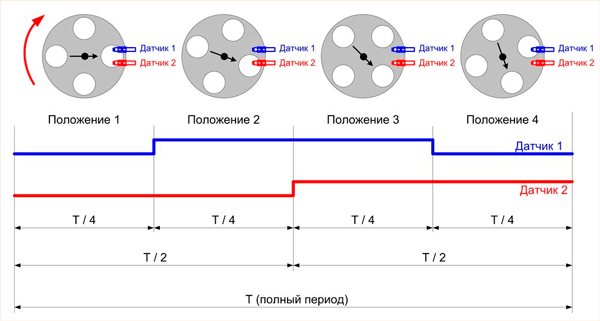
- Энкодер от англ. Принцип работы энкодера заключается в преобразовании механического перемещения в электрические сигналы, у обычного инкрементального энкодера, который мы будем рассматривать, этот сигнал представляет собой два квадратных сигнала при равномерном вращении , сдвинутых по фазе на 90 градусов.
- В очередном уроке мы рассмотрим работу Arduino с энкодером который служит для преобразования угла поворота в эл.
- Энкодер - это устройство преобразования механического перемещения или угловых изменений положения в цифровой сигнал.
- Очень часто оно являлось единственным средством общения с 3D-принтерами прошлого поколения, а многими приверженцами старой школы считается самым удобным решением и сейчас. Именно его мы рассмотрим внимательно в этой статье и разберемся, как его можно использовать в своих проектах.
- Оптические энкодеры выпускаются великим множеством производителей, но основное принципиальное отличие моделей лишь одно: количество импульсов на один оборот вала. База знаний.





Инкрементальный энкодер rotary encoder — это тип электромеханического датчика, который можно использовать для определения углового положения его оси. Данный датчик формирует на своем выходе электрические сигналы в зависимости от направления вращения своей оси. Энкодер состоит из механических компонентов, поэтому он отличается надежностью работы и используется в различных приложениях: роботы, компьютерные мышки, плоттеры, принтеры и т. Существует два типа энкодеров: абсолютные энкодеры и инкрементальные энкодеры. В данной статье мы будем использовать инкрементальный энкодер.